
当前,机械信息超材料(MIMs)在处理极端环境下的信息方面潜力巨大,但主流基于结构变形的MIMs面临三大瓶颈:可逆编程困难、信息密度有限,以及三维变形信息难以直接读取。
为解决这些问题,本研究转向刚度作为新的信息载体,并提出利用磁流变材料来实现可重编程。然而,实现实用的刚度型MIMs仍需攻克三个核心挑战:实现离散、稳定的刚度状态以清晰区分信息;确保状态切换时结构几何高度不变以便于信息检索;以及解决刚度变化不可见的问题,需要开发直观的可视化读取方案。为此,本文旨在通过一种受脊柱启发的创新策略,构建一种新型超材料来同时解决这些挑战。
解决的问题:
1. 可逆性与稳定性:大多数基于结构变形的力学信息超材料(MIMs)难以实现可逆的信息编程,且状态稳定性不足。
2. 信息密度与读取:基于三维高度变形的信息编码密度有限,且难以直接、直观地读取。
3. 状态区分与可视化:传统的磁流变材料刚度调节是连续的,难以实现离散、可靠的状态区分;同时刚度变化本身不可见,需要辅助读取手段。
提出的方法:
1. 仿生结构设计:受脊柱结构启发,设计了具有特定间隙的磁流变脊柱(MRS)梁作为核心单元。
2. 磁控双稳态刚度切换:利用磁场控制MRS梁的弯曲方向,使其间隙在压缩时扮演不同角色(限位或释放),从而实现高刚度(ON)和准零刚度(OFF)两种离散、稳定的状态,并可通过磁场快速、可逆地切换。
3. 并行阵列架构:将多个双稳态MRS单元并行排列构成刚度可重编程磁流变超材料(SRMM),通过独立控制每个单元的状态,实现对整体刚度的多级(多比特)编程。
4. 力学发光可视化:将力学发光材料与SRMM集成,利用ON状态单元能有效传递载荷激发发光的特性,将不可见的刚度信息直接转换为可见的光信号,实现信息的直观读取。
实现的效果:
1. 高性能刚度切换:实现了高达40倍的刚度变化比(ON: 240 N/m, OFF: 7 N/m)。
2. 高密度信息编码:在一个3x3的SRMM阵列中实现了10比特的信息编码容量。
3. 快速可逆编程:单元状态切换速度快(~0.12秒),并经过1000次循环测试证明具有良好的可逆性和耐久性。
4. 直观信息可视化:成功将编码的刚度信息以光斑图案形式显示出来(如字母“USTC”、星形图案)。
5. 机械逻辑计算:通过磁耦合控制多个单元,实现了基本的机械逻辑门操作(AND, OR, NOR, NOT)。
创新点:
1. 范式转换:从传统的基于“变形/高度”的力学信息编码,转向基于“刚度”的编码范式,利用刚度的双稳态特性,解决了可逆编程和状态稳定性的难题。
2. 仿生与磁控结合:巧妙地将脊柱的仿生结构设计与磁流变材料的场响应特性相结合,实现了大对比度、离散、磁控的刚度切换。
3. 并行处理与高密度编码:采用并行单元阵列结构,显著提高了信息编码的比特容量和存储密度。
4. 力学-光学信息耦合:创新性地引入力学发光材料,实现了力学信息(刚度)到光学信息(光强/图案)的直接、无损、可视化转换,提供了便捷的读取方式。
5. 多功能集成:在同一平台上集成了高密度信息存储、可视化读取和逻辑计算等多种功能,展示了SRMM作为综合性力学信息处理平台的潜力。
研究成果以题为:《Stiffness reprogrammable magnetorheological metamaterials inspired by spine for multibit visual mechanical information processing》发表于期刊《Science Advances》。单位为:中国科学技术大学、中国科学院力学研究所,第一作者为:中国科学技术大学Congcong Lou.
摘要:
将信息处理功能嵌入力学超材料中,有助于构建多功能机械系统,这在为极端环境提供信息处理平台方面具有独特优势。然而,在大多数力学超材料中实现高密度、可重编程且视觉可读的信息处理仍然是一个挑战。在此,我们报告了一种多比特编程脊柱结构策略,用以创建一种具有高密度、可重编程和视觉可读信息编码能力的磁流变超材料。受脊柱特征启发,我们构思了刚度可重编程磁流变超材料(SRMM),其核心是磁流变脊柱梁,它们通过双稳态转变展现出显著的刚度变化。该SRMM表现出巨大的刚度转换能力(40倍)和高密度信息编码性能(10比特)。通过与力学发光材料耦合,力学信息得以方便地实现可视化,这归因于刚度数据通过光学能级跃迁被转换为光学信号。这种基于刚度的磁流变超材料提供了广阔的信息编码空间、稳定的操作能力和便捷的读取方法,推进了适用于极端环境的机械信息处理系统的设计。
图1:SRMM的设计与编程
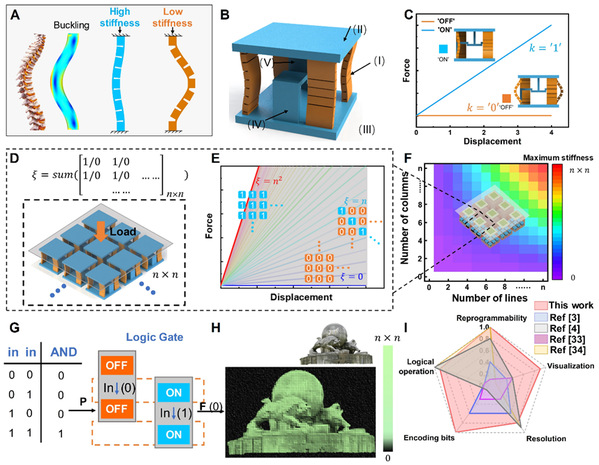
(A) MRS梁的结构设计。
(B) SRMM单元的示意图,(i) MRS梁,(ii) 顶盖,(iii) 底座,(iv) T形和(v) L形约束件。
(C) 单元的力-位移关系及其在ON和OFF状态的示意图。
(D) SRMM的阵列结构和刚度编程方法,ξ代表阵列中处于ON状态的单元数量。
(E) SRMM可重编程的力-位移曲线。
(F) SRMM的最大刚度与阵列中单元数量的关系。
(G) 基于磁耦合控制的SRMM中AND门逻辑计算 [输入 (0 1), 输出 (0)]。
(H) 通过SRMM中并行多单元编码多比特信息。
(I) 本工作与已发表工作中MIMs综合性能的雷达图对比。综合归一化的五个参数包括可重编程性、可视化、分辨率、编码比特数和逻辑运算。
图2.打印材料的力学性能以及结构参数对MRS梁刚度调控的影响
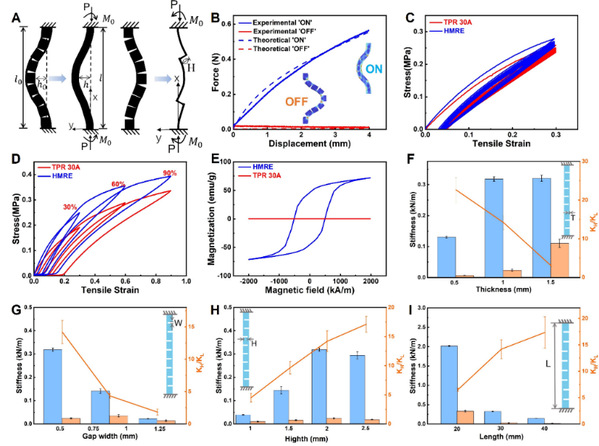
(A) MRS梁在两种状态下的简化模型。
(B) MRS梁在两种状态下的压缩结果。
(C) TPR 30A和HMRE的循环拉伸测试。
(D) TPR 30A和HMRE在不同应变下的拉伸测试。
(E) TPR 30A和HMRE的磁滞回线。
(F 至 I) 具有不同几何参数的MRS梁在双稳态下的刚度(蓝色柱表示ON状态,橙色柱表示OFF状态)。emu, 电磁单位。
图3. 预压缩下MRS梁的双稳态行为
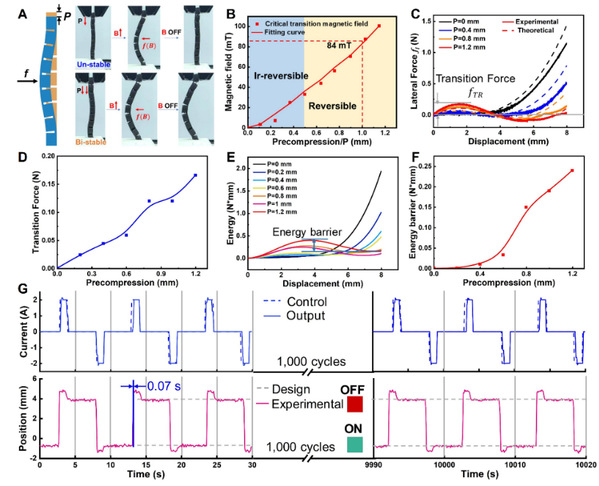
(A) MRS梁的稳定性示意图。
(B) 临界磁场与预压缩的关系(不可逆/可逆切换)。
(C) MRS梁的侧向力-位移曲线。
(D) MRS梁中的转变力。
(E) MRS梁的势能。
(F) MRS梁的能垒高度。
(G) 在1毫米预压缩位移下超过1000次的可逆编程。螺线管中的输入电流(顶部)和由磁场产生的MRS梁相应的中心位移(底部)。
图4. 单元和SRMM的刚度重编程能力
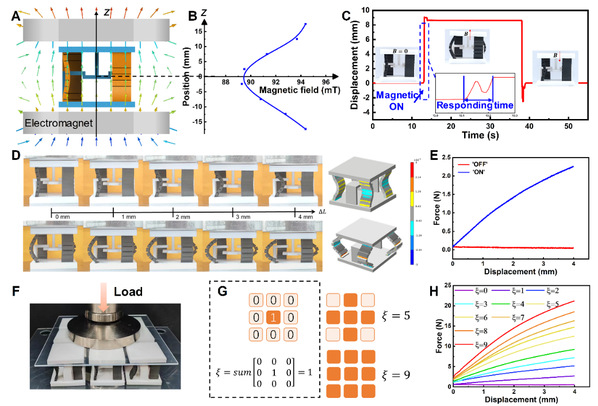
(A) 用于单元的磁场施加装置示意图。
(B) 不同位置的磁场强度。
(C) 在磁场作用下单元在两种状态之间的转变速度。
(D) 两种状态下单元压缩的实验和模拟。
(E) 单元在两种状态下的力-位移曲线。
(F) 由3x3单元组成的SRMM的实验图像。
(G) SRMM的刚度编程模式。
(H) 不同刚度程序下SRMM的力-位移曲线。
图5. SRMM(3x3阵列)的编码与可视化
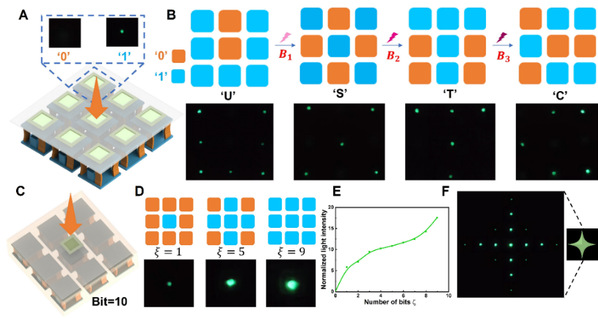
(A) 2比特可视化的SRMM。
(B) 在磁场作用下,2比特SRMM依次编码出“U”、“S”、“T”和“C”。
(C) 10比特可视化的SRMM单元。
(D) 对应于刚度程序的发光形态。
(E) 光强度与ξ的关系。
(F) 不同强度的光斑形成星形图案。
图6.信息逻辑计算
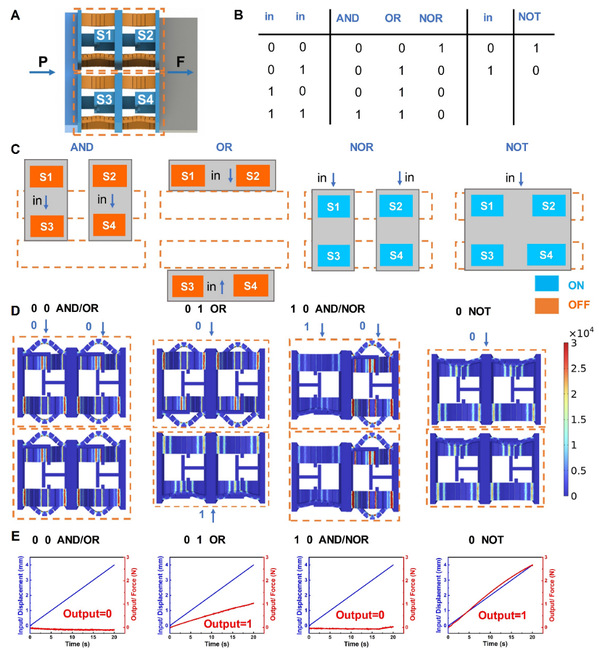
(A) 由四个单元构成的机械逻辑门。
(B) 不同种类逻辑门的真值表。
(C) 不同机械逻辑运算的耦合控制和初始状态。
(D) 不同输入和逻辑运算下机械逻辑门的数值模拟。
(E) 不同逻辑运算的输入和输出。
文章信息
DOI:https://www.science.org/doi/10.1126/sciadv.ady8430