
来源:“高分子科技”公众号
将信息处理嵌入机械超材料有助于构建多功能机械系统,这在极端环境下提供信息处理平台方面具有独特的优势。然而,机械超材料实现高密度、可重编程和视觉可读的信息处理仍然是一个挑战。
近期,龚兴龙、邓华夏教授团队在《Science Advances》上发表题为“Stiffness Reprogrammable Magnetorheological Metamaterials Inspired by Spine for Multi-bit Visual Mechanical Information Processing”的研究,将一种仿生刚度可编程磁流变超材料(Stiffness Reprogrammable magnetorheological metamaterial, SRMM)与力致发光材料结合,成功开发出了多位可视化机械信息计算超材料。该成果不仅实现了刚度40倍的磁控智能调节,更让可视化机械信息计算领域向实用化迈出关键一步。
一、研究背景:
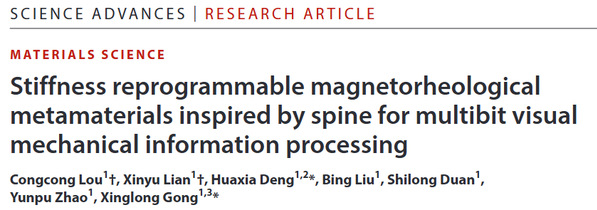
脊柱结构正反弯刚度差异来自于间隙之间的作用,脊柱在柔性弯曲时,间隙张开,当向刚性方向弯曲时,间隙之间接触,抵制了进一步的变形,此时表现出刚性。研究人员通过研究梁在屈曲状态下的受力分析,在梁上设计间隙,得到了非对称结构的磁流变仿脊柱梁(MRS beam),MRS梁在两个弯曲状态下变形出极大的刚度差异,硬磁材料允许磁场调控其弯曲状态,实现刚度可编程。将刚度可编程超材料与力致发光材料耦合,首次建立了多位可视化机械信息处理系统。
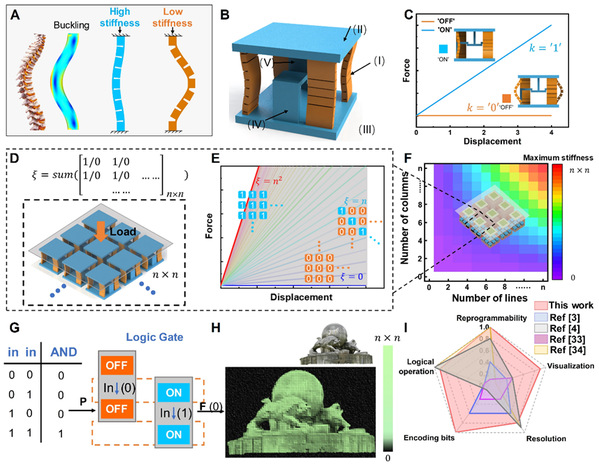
图1. SRMM的设计与编程。
二、核心设计:仿脊柱机构+磁流变材料的“强强联合”
1. 变刚度梁:仿脊柱正反弯曲超大刚度变化
核心构件“磁流变脊柱(MRS)梁” 由硬磁流变弹性体(HMRE,NdFeB 颗粒与弹性体按 1:1 混合)经 3D 打印制备,经磁场磁化后,“ON” 状态(高刚度)下,间隙侧面接触,MRS 梁近似 “实心弯曲梁”,刚度达240 N/m;“OFF” 状态(准零刚度)下,间隙使梁呈 “不规则薄壁结构”,刚度仅约7 N/m,刚度对比高达 40 倍,为机械信息的 “0-1” 离散编码筑牢基础。
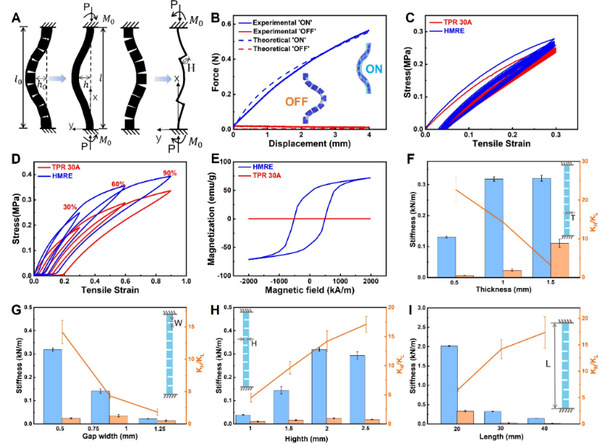
图2. 打印材料的力学性能以及结构参数对MRS梁刚度调控的影响。
2. 磁流变材料:刚度的可控磁编程
通过准静态实验评估了预压缩位移对MRS梁双稳态性能的影响。随着预压缩位移的提升,MRS梁表现出双稳态特性,且状态切换所需要的磁场随着预压缩位移的增大而增大。同时进行实验验证,随着预压缩位移的增大,MRS梁在“ON”和“OFF”之间状态切换所需的横向力显著提升。可以发现,随着预压缩位移的增大,“ON”和“OFF”状态之间的势垒显著增大,需要更多的能量输入才能实现状态之间的切换。1000次的磁控切换实验证明了MRS梁的刚度调控稳定性。
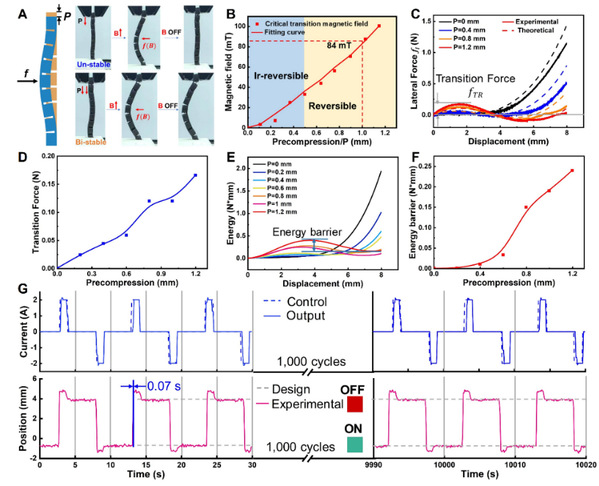
图3. MRS梁在预压缩下的双稳态行为。
三、实验结果:从“刚度编程”到“机械信息计算”
1. 刚度编程:多级高分辨刚度编程
将MRS梁集成得到SRMM晶胞,打印的“T”、“L”形结构为MRS梁提供了双稳态所需的预压缩位移。通过改变施加磁场的方向,单元可以在两种不同的状态(“ON”和“OFF”状态)之间切换,转换快速发生,通常在约 0.12 秒内完成(图 4C)。我们通过实验和有限元建模模拟来检查单元在两种状态下的压缩变形,证实了理论预测(图 4D)。在“ON”状态下,间隙侧面在压缩下接触,抵抗进一步变形,从而表现出高刚度。在“OFF”状态下,只有厚度层抵抗压缩,表现出超低刚度(图 4E)。构建了由“3×3”的单元阵列组成的 SRMM。在这种配置中,SRMM的刚度编程可由磁场调控的“ON”状态单元的数量 ξ 决定(图 4G)。
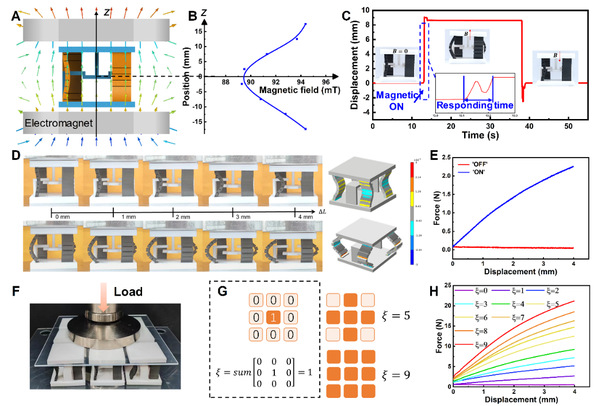
图4. 单元和SRMM的刚度重编程能力。
2. 可视化机械信息编码:基于刚度编程的可视化图案编码
他们通过嵌入力致发光材料来将SRMM的刚度可视化(图5A)。刚度信息通过光强度直接读取,提供了一种更直观的方式来识别和显示机械特性。外部载荷通过“ON”状态的单元传递到机械发光材料,由于其高刚度,从而诱导发光。相反,当单元处于“OFF”状态时,其准零刚度阻止载荷传递到机械发光材料,导致黑暗。因此,通过编程磁场调整单元的状态并施加外部载荷,刚度信息可以通过磁控制编码在光点中。如图 5B 所示,光点依次形成字母“U”、“S”、“T”和“C”。
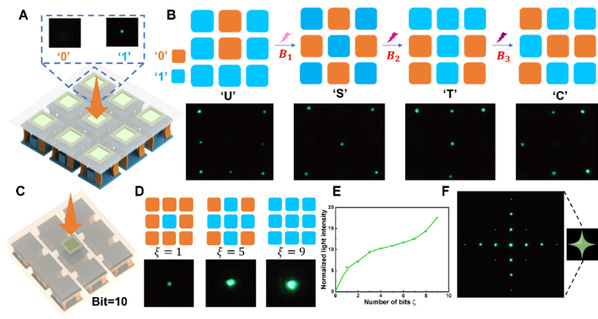
图5. SRMM(3×3阵列)的编码和可视化。
3. 逻辑运算:刚度0、1判定
晶胞的高度可编程刚度特性使得机械逻辑操作得以实现。如图 6A 所示,他们通过串联连接两个并联单元来实现所需的机械逻辑门。这种四单元机械逻辑门的功能类似于传统的电子逻辑门。例如,在“与”逻辑操作中,两个开关串联排列,只有当两个开关都处于“ON”状态时,信号才能通过。换句话说,当两个输入都为“1”(真)时,逻辑操作的输出也为“1”(真)。相反,当开关并联连接时,当任一开关处于“ON”状态时,电路允许信号输出,对应于“或”门(图 6B)。通过组合这些逻辑门,有望实现具有复杂计算功能的机械逻辑操作。
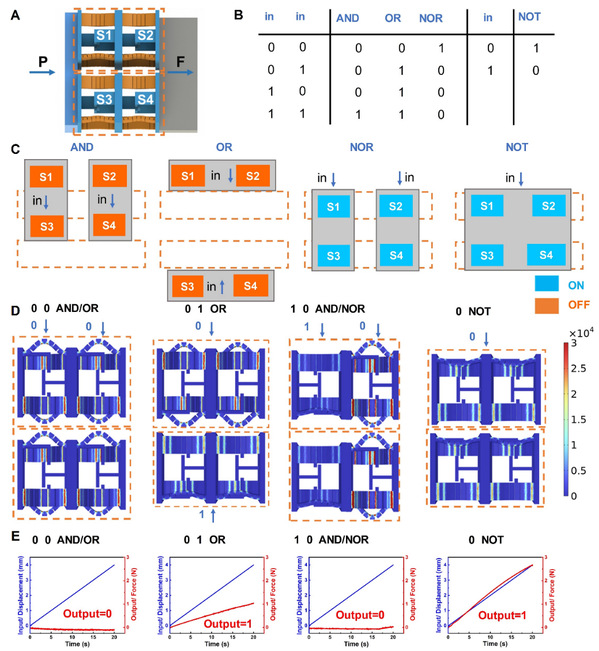
图6. 信息逻辑计算。
四、总结
提出了一种多位编程的脊柱结构策略,通过构建刚度可重编程磁流变超材料(SRMM)来实现高密度和可重编程的机械信息处理。通过实验测试和概念演示探讨了其作为机械信息处理平台的潜力。SRMM由单元阵列组成,单元中的双稳态可以独立控制,从而实现SRMM刚度的重编程。鉴于单元刚度调节的独立性,通过编程单元的刚度来实现信息的写入和擦除。通过组装机械发光材料将刚度信息可视化。具有不同刚度的单元在外部载荷下呈现出不同光强度的光斑。通过这种方式,可以基于 SRMM 构建的机械信息平台实现多位高密度信息编码。该设计策略为创建可实现多功能的其他刺激响应材料提供了途径。总而言之,所提出的基于刚度的 SRMM 为机械超材料在信息处理平台领域的发展提供了广阔前景。
论文第一作者为中国科学技术大学工程科学学院博士生娄聪聪和连芯玉博士后,龚兴龙教授和邓华夏教授为论文通讯作者,研究贡献者还包括中国科学技术大学工程科学学院的刘冰、段世龙、赵蕴普等。该工作得到国家自然科学基金、中央高校基本科研业务费专项资金、中国博士后科学基金、中国科学院人才引进计划以及安徽省自然科学基金等项目的支持。
原文链接:Congcong Lou, Xinyu Lian, Huaxia Deng, Bing Liu, Shilong Duan, Yunpu Zhao, Xinglong Gong. Stiffness reprogrammable magnetorheological metamaterials inspired by spine for multibit visual mechanical information processing. Sci. Adv. 11, eady8430(2025).
https://www.science.org/doi/10.1126/sciadv.ady8430