
来源:“高分子科技”公众号
攀援软机器人因其可以提供出色的灵活性、适应性和机械坚固性,在探索和监测复杂、非结构化环境方面的应用前景广阔,引起了越来越多的关注。尽管软机器人在这一领域取得了显著进展,但单一响应的软机器人限制着机器人在平面和曲面之间灵活的转换与过渡。因此,如何通过多场协同控制软机器人在平坦/曲面上的攀爬,对拓展软攀援机器人的应用具有重大意义。
日前,中国科学技术大学龚兴龙教授团队受攀援植物启发设计了用于过渡复杂曲面的多响应仿生驱动器。通过将液晶弹性体(LCE)、液态金属(LM)和磁性 Ecoflex(Mecoflex)进行组装,开发电/红外(IR)光/磁多场耦合软驱动器(图1)。基于热膨胀差异和液晶相变的协同效应,驱动器可在超低电压(1.0 V)下实现357°的弯曲角度。此外,通过对 LCE 层中的分子取向和 Mecoflex 层中磁性颗粒取向设计,软驱动器在电/光/磁单场控制下产生弯曲变形;在电/磁和光/磁耦合驱动下产生弯曲或螺旋弯曲的进一步变形。基于复杂变形能力,设计了仿生攀爬植物和四足攀援机器人。通过对四足机器人的结构设计,四足机器人可以在电/磁和光/磁的协同控制下实现平面和曲面的爬行,展现机器人在复杂环境的应用潜力。该工作已发表在《Advanced Functional Materials》期刊上,题为“Climbing Plant‐Inspired Multi‐Responsive Biomimetic Actuator with Transitioning Complex Surfaces”。
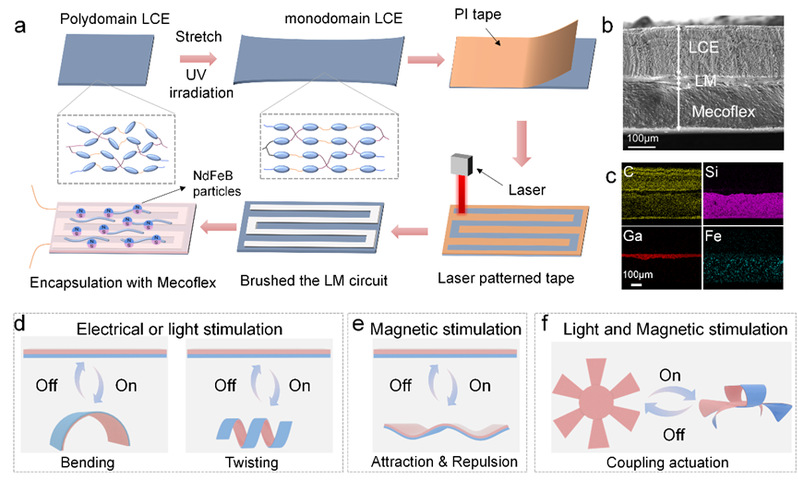
图1. LCE/LM/Mecoflex 软驱动器的制备和表征。
在热膨胀系数差异产生的变形失配和LCE中液晶分子的相变变形协同作用下,LCE/LM/Mecoflex驱动器展现了良好的电/光驱动器性能(图2a-h),驱动器在1.0 V 驱动电压下产生357°的大变形。由于钕铁硼颗粒的硬磁特性,LCE/LM/Mecoflex 驱动器具有可编程的驱动性能(图2i-l)。
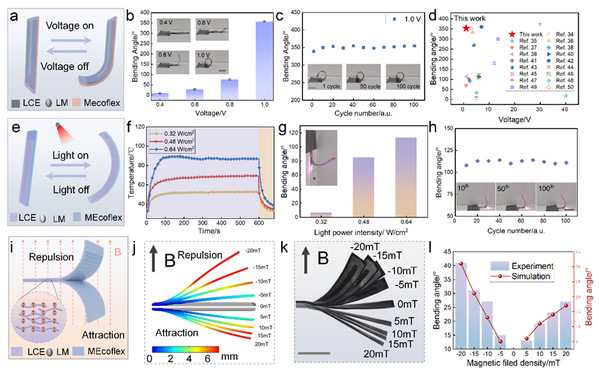
图2. LCE/LM/Mecoflex驱动器的电/光/磁驱动性能。
通过定制LCE 层的液晶分子取向,设计了仿生攀援驱动器,在电/光刺激下产生螺旋弯曲变形,其中取向角 β 被定义为 LCE 中的取向方向与薄膜长轴之间的夹角(图 3a)。当取向角 0°<β<90° 时,驱动器向左产生螺旋弯曲变形。当取向角 90°<β<180° 时,驱动器向右产生螺旋弯曲变形。
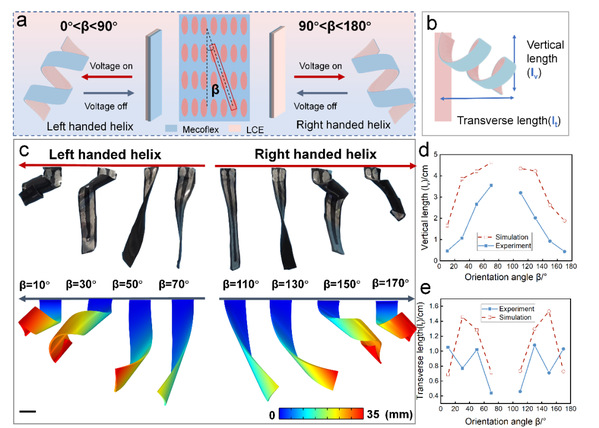
图3. LCE/LM/Mecoflex驱动器的螺旋弯曲性能。
通过设计 LCE 层中的液晶分子取向和 Mecoflex 层中磁性颗粒的编程磁化,软驱动器在电/光/磁单场控制下产生弯曲变形,在电/磁和光/磁耦合驱动下产生弯曲或螺旋弯曲的进一步变形,实现复杂的耦合变形结构(图4)。
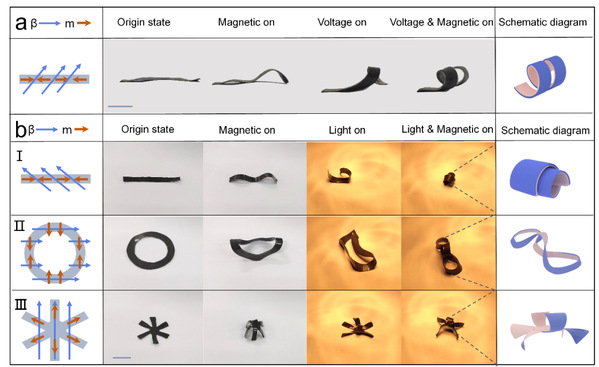
图4. LCE/LM/Mecoflex驱动器的耦合驱动性能。
基于LCE/LM/Mecoflex驱动器良好的电热驱动性能,通过对LM通路的设计可以实现驱动器的顺序性和选择性驱动,并进一步开发智能抓手和仿生攀援植物实现对规则的花束的抓取和缠绕(图5)。
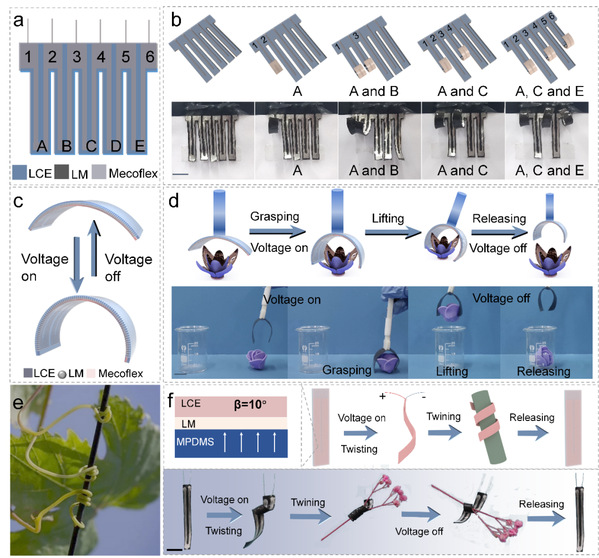
图5. LCE/LM/Mecoflex驱动器的应用展示。
最后,由于LCE/LM/Mecoflex 执行器具有可编程的双各向异性和多响应性,可用于设计环境适应性仿生四足机器人,实现类似于尺蠖的爬行运动。通过对 “工”字结构的四足机器人进行结构设计,实现其在平面和曲面的爬行(图6)。
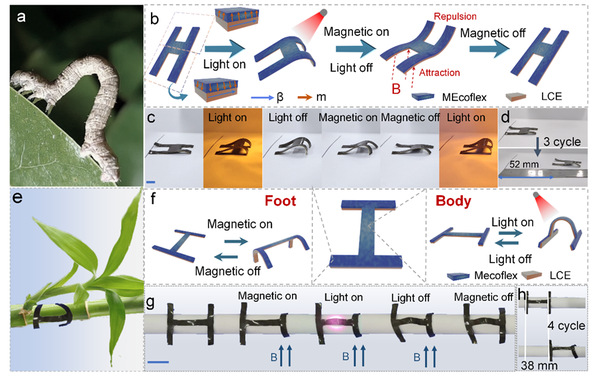
图 6. 仿生攀援四足机器人的应用展示。
综上所述,他们提出了一种受攀援植物启发的多响应和可编程驱动的LCE/LM/Mecoflex 驱动器。由于不同热膨胀和液晶相变的协同作用,LCE/LM/Mecoflex 的变形得到了进一步增加。通过设计 LCE 层中的分子取向和 Mecoflex 层中磁性颗粒磁化方向,LCE/LM/Mecoflex 执行器在施加电场、红外光场和磁场时表现出可逆、大且稳定的弯曲或螺旋弯曲行为。基于这种良好的驱动器性能,他们开发出了多种可编程软驱动器,它们可以在电/磁或红外光/磁协同作用下在二维和三维结构之间进行可逆切换。最后,一个四足机器人在平面和曲面上的爬行实验清楚地证明了所开发驱动器的灵活性,为多场耦合驱动机器人的设计和制造提供了一些启发。
论文的第一作者为中科大工程科学学院博士研究生李文文,通讯作者为中科大工程科学学院龚兴龙教授、宣守虎教授和香港浸会大学Ken Cham-Fai Leung associate professor。该研究得到了国家自然科学基金和中科大微纳研究与制造中心的资助和支持。
原文链接:W. Li, C. Lou, S. Liu, Q. Ma, G. Liao, K. C.-F. Leung, X. Gong, H. Ma, S. Xuan, Climbing Plant-Inspired Multi-Responsive Biomimetic Actuator with Transitioning Complex Surfaces. Adv. Funct. Mater. 2024, 2414733. https://doi.org/10.1002/adfm.202414733.