
文章出处: 化学与材料科学
近年来,软驱动器引起了研究者们的广泛关注,因其可将外部刺激(如:光、湿度、电、磁等)转化为形变,并应用于医疗保健、货物运输、人工智能机器人等领域。然而多数驱动器因响应单一而无法应对复杂的任务需求,因此对开发多场响应的软驱动器提出了迫切的需求。由于电热驱动器具有操作简单,使用方便,可控性强等优点,基于电与湿度、电与光、电与热驱动的多响应驱动器已得到深入研究。目前,将电热驱动与具有无线操作、无需与驱动器直接接触优点的磁驱动进行结合,开发智能双模驱动器的研究较少。
鉴于此,中国科学技术大学龚兴龙教授团队在《Composites Part B: Engineering》上发表了题为“Dual-mode biomimetic soft actuator with electrothermal and magneto-responsive performance”的论文。该论文将磁性钕铁硼(NdFeB)/聚二甲基硅氧烷(MPDMS)复合层、MXene薄膜和聚四氟乙烯(PTFE)胶带结合在一起,制备了具有电热/磁耦合驱动的三明治结构软驱动器(MPDMS/MXene/PTFE)。
驱动器的设计制备
研究人员采用真空抽滤的方法制备了层状结构的MXene薄膜;然后将其与磁性NdFeB/聚二甲基硅氧烷(MPDMS)薄膜和聚四氟乙烯(PTFE)胶带结合在一起,制备了MPDMS/MXene/PTFE驱动器(图1)。基于MXene薄膜优异的导电性,MPDMS薄膜与PTFE胶带的热膨胀系数差异较大,软驱动器表现出良好的电热驱动性能,在3 V电压下弯曲变形可达353°。(图2、图3)

图1. MXene薄膜和MPDMS/MXene/PTFE三明治结构的制备工艺示意图。
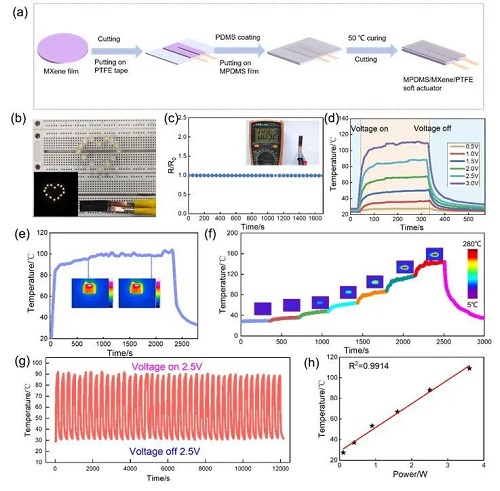
图2. MPDMS/MXene/PTFE驱动器的电热性能。
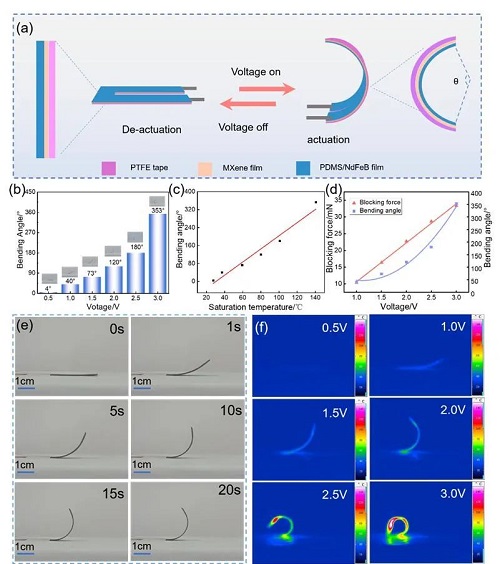
图3. MPDMS/MXene/PTFE驱动器的电热驱动性能。
智能抓手
由于软驱动器在物体的控制和转移方面具有巨大的潜力,为了研究先进结构驱动器的可行性,研制了一种基于MPDMS/MXene/PTFE软驱动器的智能抓手(图4a),在通电情况下可以抓取和转移不规则假花花束,在稳定的电压下将假花花束移动到较高的高度而不掉(图4b)。此外四指抓手可以包裹住鹌鹑蛋并对其进行加热(图4c),证明该抓手不仅可以抓取和传递物体,还可以对抓取的物体进行有效的加热,可以用于需要一次操作完成物体的传递和加热的特殊场景。
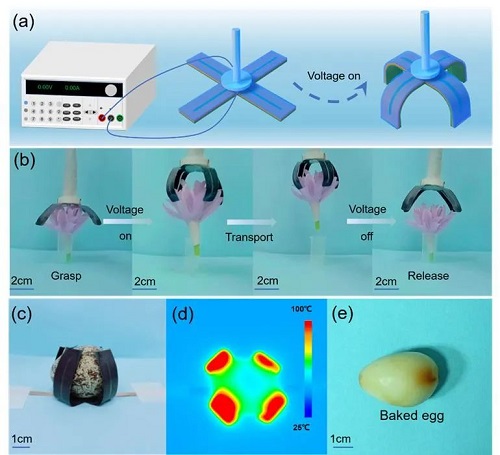
图4. 基于MPDMS/MXene/PTFE软驱动器的智能抓手,在通电情况下可以抓取和转移不规则花束,加热鹌鹑蛋。
仿生蜻蜓翅膀
基于MPDMS/MXene/PTFE结构的磁驱动性能,研究人员设计了仿生蜻蜓翅膀(图5),并测试其在不同方向磁场下的变形行为,用于模拟蜻蜓在自然界飞行时翅膀煽动的行为。此外有限元模拟结果与实验结果一致也证明了有限元模拟可以为实验提供理论指导。
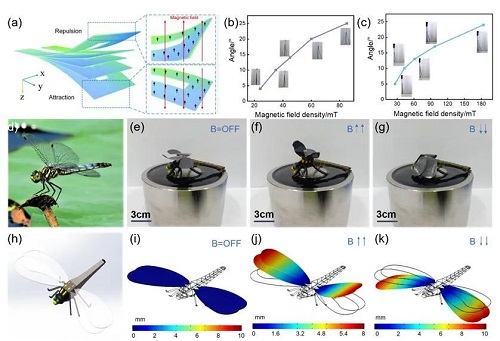
图5. 基于MPDMS/MXene/PTFE结构的仿生蜻蜓翅膀在不同磁场下的变形,用于模拟蜻蜓飞行时翅膀扇动行为。
电热和磁耦合驱动的爬行机器人
基于MPDMS/MXene/PTFE驱动器良好的电热和磁驱动性能,研究人员设计了爬行机器人(图6),实现了在电场和磁场交替配合情况下的自主向前爬行运动。为研发可以自主运动的仿生机器人提供了新的思路。
图6. 在电热和磁配合驱动下自主向前爬行的爬行机器人。
综上所述,该工作研制了一种具有电热和磁双驱动性能的MPDMS/MXene/PTFE复合薄膜,并研发了智能抓手,仿生蜻蜓翅膀,爬行机器人等应用,为设计适用于智能设备、软机器人、可穿戴软电子等多种实际应用的高性能多功能耦合驱动软驱动器提供了新的思路。论文第一作者为中国科大工程科学学院硕士研究生李文文和博士后桑敏,通讯作者为中国科大工程科学学院龚兴龙教授和宣守虎教授。
该研究得到了国家自然科学基金项目、中央高校基础科研基金和国家航空科学基金的资助和支持。
原文链接
Wenwen Li, Min Sang, Shuai Liu, Bochao Wang, Xufeng Cao, Guanghui Liu, Xinglong Gong, Lingyun Hao, Shouhu Xuan, Dual-mode biomimetic soft actuator with electrothermal and magneto-responsive performance, Composites Part B: Engineering,2022,109880,1359-8368.