
来源:“高分子科技”公众号
受到软体动物身体运动灵巧性和敏捷性的启发,能够将外部刺激转化为变形和运动的软致动器已被开发出来,并在软机器人、人造肌肉、可穿戴设备和生物医学等领域显示出广泛的应用前景。与传统的刚性致动器相比,软致动器具有出色的灵活性和丰富的可操作性。软致动器的运动通常来自能够主动响应外部刺激的软材料,如磁流变材料、形状记忆聚合物、光响应凝胶等。然而,单激励驱动可能受到环境适应性差和单一运动模式的限制,而集成多刺激响应的多激励驱动有望解决这个问题。因此,开发具有多刺激响应的软致动器以适应复杂的运动要求成为一项挑战。
鉴于此,中国科学技术大学龚兴龙教授团队利用拉伸取向、光固化和液体封装策略,开发了用于软致动器的复合材料,其具有对光热效应和磁场的多刺激响应。在近红外光刺激下,具有热致形状记忆效应的液晶弹性体部件表现出向光弯曲,而复合材料表现出定向弯曲,并且在多激励驱动下展现出原位转向和沿特定路径爬行的能力。相关研究成果近日以“Multi-stimulus responsive soft actuator with thermotropic shape memory and local magnetic programming properties”为题发表在《Composites Part B: Engineering》上。论文第一作者为中国科学技术大学工程科学学院博士研究生孙玉玺,通讯作者为龚兴龙教授和桑敏特任副研究员。
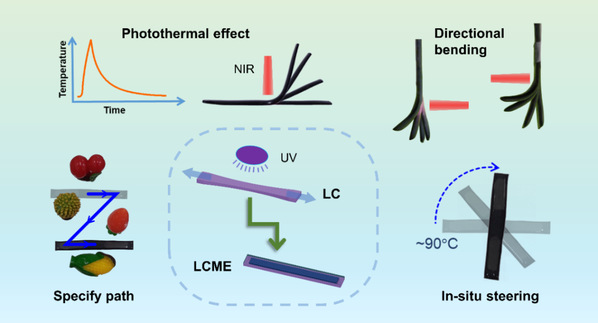
为了实现多刺激响应驱动模式,将含有碳纳米管(CNTs)的液晶弹性体(LCE)、磁流变液(MRF)和Ecoflex组装成柔性复合材料LCE-CNT/MRF/Ecoflex(LCME)。其中,LCE是一种网状结构材料,通过将液晶基元嵌入弹性聚合物中并适度交联而形成,兼具软弹性和热致形状记忆特性。在CNTs的光热效应辅助下,温度升高导致含有CNTs的LCE(LC)中液晶基元的重新排列,使LC在初始配置和热致配置之间实现可逆的双向变形。无添加剂的高性能磁流变液是通过离子液体和硅油混合作为载液制备的,并为LCME提供磁引导和运动方向控制。
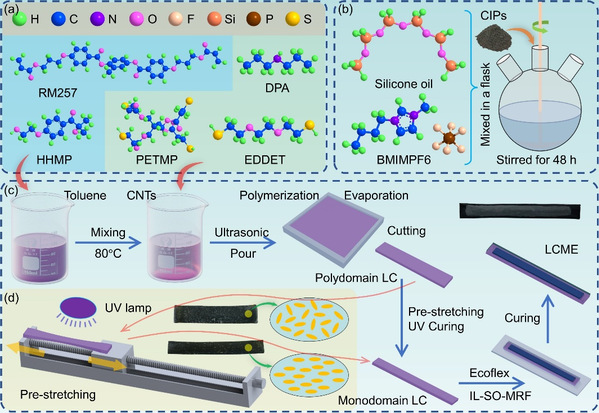
图1. 拉伸取向、光固化和液体封装策略
多畴LCE经过拉伸取向和紫外光固化制备成单畴LCE,广角X射线散射(WAXS)图谱表明LCE从各向同性排列结构转变为沿预拉伸方向取向的定向排列结构。单畴LCE在热刺激下从向列相转变为各向同性相(多畴LCE),导致宏观尺度上的收缩变形,这种可逆变形能力被称为热致形状记忆特性。含有0.2 wt% CNTs的单畴LCE样品LC0.2表现出最高的吸光度。此外,单畴LCE的断裂应力增加了近5倍,其弹性模量和拉伸强度显著增加。
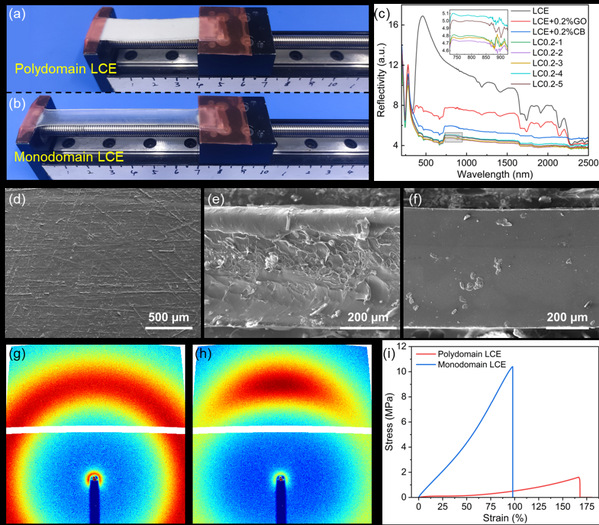
图2. LCE和LC的结构特征
IL-SO-MRF是基于离子液体和硅油混合载液的无添加剂高性能磁流变液,表现出明显的MR效应。无磁场时表现出液体的流动性,有磁场时磁性颗粒沿磁场方向排列成链状结构,IL-SO-MRF也从液态转变为类固态。储能模量和损耗模量的变化体现出IL-SO-MRF状态的变化。IL-SO-MRF的剪切应力随着羰基铁粉(CIP)含量的增加而增加。在LCME的致动运动中,单独的光热致动没有指向性,而IL-SO-MRF的磁特性为LCME的变形提供了受力点,从而可以引导制动器的运动方向。
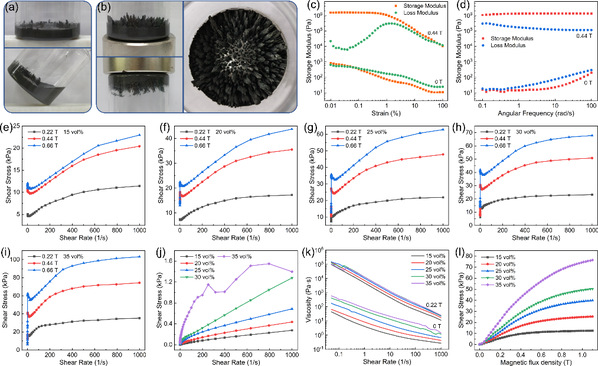
图3. IL-SO-MRF的磁流变性能
CNTs的添加使LC表现出显著的光热效应,LC中光热效应产生的最高温度与近红外光辐射照度呈线性相关。LC在光热变形循环实验中表现出优异的循环稳定性和耐久性。在近红外光的短暂照射下,LC的两侧温差导致不同的收缩变形,由于被照射侧的温度较高,发生了向光弯曲。LC的致动应力可达0.35 MPa,表现出优秀的致动性能。由于Ecoflex层的透光性和光不敏感性,当LCME的两侧分别受到近红外光照射时,都会发生向L侧弯曲的定向变形,表现出高效的光热效应和优异的弯曲致动性能。
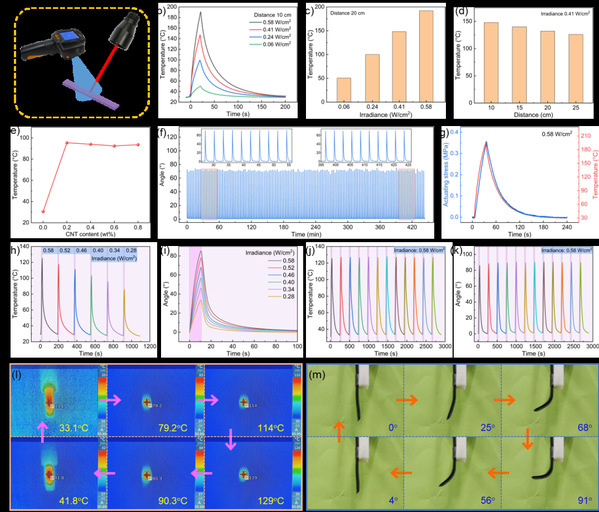
图4. LC和LCME的光热效应和变形
在大约13倍于其自身重量的负载下,LC在近红外照射下发生28.6%的收缩应变以提升重物。通过结构设计开发出LCEc(由LC与Ecoflex复合而未引入MRF)软致动器,在近红外光单激励致动下,其可以在棘板上执行单向爬行运动。通过有限元仿真模拟了爬行过程中的变形和位移。然而,LCEc软致动器的运动受到应用场景和运动自由度的限制。
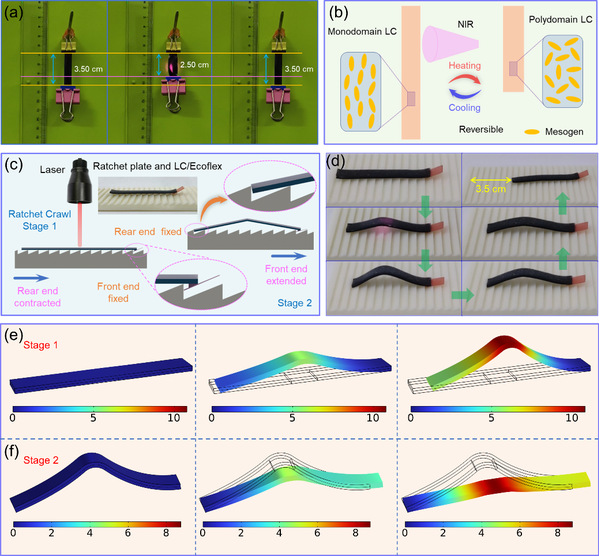
图5. LCEc的光热致动
LCME在光热效应下的热致变形是无方向性的,而磁场可以为其提供一个施力点,从而引导和控制LCME的运动方向。LCME的临界致动磁场与IL-SO-MRF的屈服应力呈正相关。在LCME的制备过程中,可以自主设计IL-SO-MRF的填充区域,这体现了LCME软致动器结构的局部磁编程特性。与LCEc相比,通过在LCME的变形和恢复过程中实施磁制导,LCME可以在平面上进行双向爬行和原位转向。这不仅简化了致动器的结构设计,而且提高了其环境适应性和运动自由度。通过将LCME爬行致动器的双向爬行和原位转向相结合,它可以成功地在平面上实现自由爬行并避开障碍物。
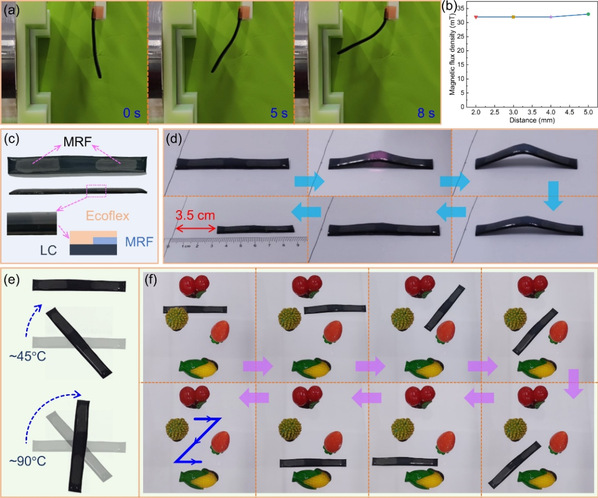
图6. LCME的光热和磁致动
综上所述,本研究通过将具有光热效应的液晶弹性体(LC)、具有磁引导特性的磁流变液(IL-SO-MRF)和软材料Ecoflex相结合,开发了一种具有热致形状记忆和局部磁编程特性的软致动器LCME。该LCME软驱动器结合了双向爬行和原地转向两种运动模式,具有避障能力,实现了沿指定路径爬行的复杂运动。通过结合光热效应和磁场的多激励致动,简化了致动器的结构设计,提高了致动器的环境适应性和运动自由度。该工作表明,多激励驱动有利于丰富软驱动器的运动模式,并为软机器人的发展指明了一个潜在的发展方向。
原文链接:
Yuxi Sun, Min Sang, Wenwen Li, Zimu Li, Yu Wang, Huaxia Deng, and Xinglong Gong. Multi-stimulus responsive soft actuator with thermotropic shape memory and local magnetic programming properties. Composites Part B: Engineering, 2025, 112964. DOI: 10.1016/j.compositesb.2025.112964.
https://doi.org/10.1016/j.compositesb.2025.112964