
来源:“高分子科技”公众号
柔性驱动器因其在生物医学、长途运输、水下探测、伪装和感知技术中的有效应用而备受关注。与传统的刚性驱动器不同,软驱动器的柔软性和高变形能力使其能够改变形状来面对复杂的外界环境。然而,传统的软驱动器在撤去外界提供的能源之后无法维持自身变形,从而恢复初始形状。然而,在实际应用中,持续供能来维持自身变形将大大限制驱动器的应用环境。因此,面对复杂的应用环境,开发零供能便可维持自身变形并在特定地点形状可恢复的驱动器对软体机器人的可持续发展具有重要意义。

鉴于此,中国科学技术大学龚兴龙教授团队报告了一种具有可保持塑性变形和可编程磁刺激形状恢复的三响应软执行器。通过自组装密度沉积方法制备了由纤维素纳米纤维/聚乙烯醇/液态金属(CNF/PVA/LM)薄膜,将其与磁性聚二甲基硅氧烷(MPDMS)薄膜组成的电热-近红外光-磁场三响应驱动器。该驱动器可以在电/光刺激下产生塑性变形,此变形在热环境中可通过磁场刺激形状恢复。该软驱动器可以在较低的电压(1.2 V)下实现较大弯曲(114°),并且可以在低强度的近红外光(0.64W cm-2)下实现远距离驱动。通过改变简单磁场的方向,演示了滚动机器人的避障能力和搬运机器人的复杂连续运动。这种集多刺激响应、低驱动电压和可编程形状恢复于一体驱动器,将为开发用于复杂仿生系统的智能材料提供借鉴。相关研究以“Triple-responsive Soft Actuator with Plastically Retentive Deformation and Magnetically Programmable Recovery”为题发表于最新一期《ACS Nano》上,论文第一作者为中国科学技术大学工程科学学院博士生李文文和博士后桑敏,通讯作者为廖国江研究员、龚兴龙教授和宣守虎教授。
作者将纤维素纳米纤维素(CNF)、聚乙烯醇(PVA)和液态金属(LM)混合,采用自组装密度沉积方法制备了具有电热/光热性能的CNF/PVA/LM薄膜。然后将其与磁性聚二甲基硅氧烷复合制备了CNF/PVA/LM/MPDMS (CPLMMP)驱动器。(图1a)由于CNF/PVA/LM层的热收缩和MPDMS的热膨胀的耦合效应使致动器在电热和光热刺激下产生塑性变形,并在热环境下响应磁场表现出可编程的形状恢复。(图1b)

图1 CPLMMP驱动器的制备示意图
基于LM优异的导电性和CNF/PVA/LM膜与MPDMS膜的热膨胀系数的差异,CPLMMP驱动器表现出了良好的电热驱动性能。当驱动器接通电源之后,CNF/PVA/LM层收缩而MPDMS层膨胀,驱动器从MPDMS层向CNF/PVA/LM层弯曲。驱动器在0.4 V超低电压便可以产生驱动行为。当驱动电压增加到1.2 V时,驱动器温度达到82.5 ℃,弯曲角达到114°, 展现出良好的电热驱动行为。(图2)
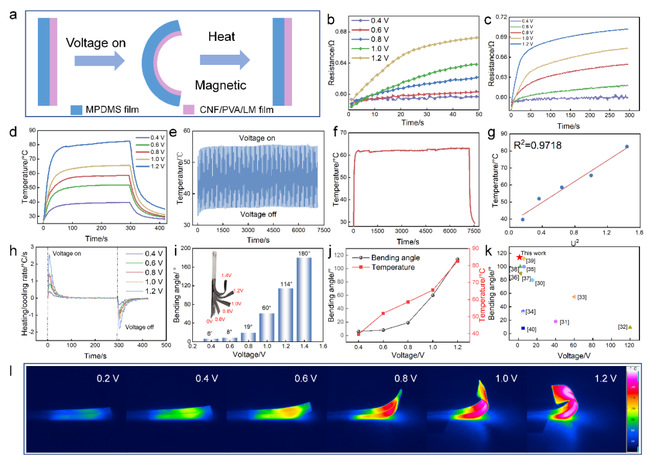
图2 CPLMMP驱动器的电热驱动性能
此外,CPLMMP驱动器还可以由红外光驱动,在近红外光照射下,CNF/PVA/LM层收缩,MPDMS层膨胀,导致驱动器由MPDMS层向CNF/PVA/LM层弯曲。去除近红外光后,CPLMMP执行器产生的塑性变形无法恢复,执行器的形状是固定的。然而这种变形可以在热环境中通过磁驱动来恢复。有限元的模拟结果也成功预测了其变形行为(图3)。手形状和花形状的变形和恢复结果表明该材料在仿生机器人中具有广阔的应用潜景。
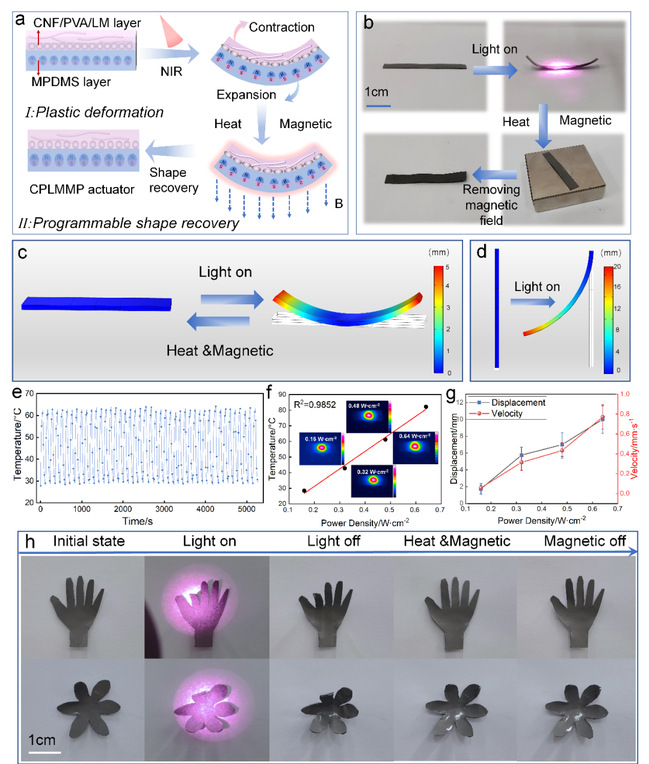
图3 CPLMMP驱动器的光热驱动性能和驱动机理
基于CPLMMP驱动器的磁驱动性能,条形驱动器可以组装成为滚轮机器人,展示了其在复杂环境中良好的避障能力。(图4)由于钕铁硼的铁磁性,当移除施加的外磁场后,MPDMS薄膜具有高剩磁。当在滚轮机器人底部放置与其磁化方向相反的小磁场时,滚轮机器人会被吸引,并跟随其磁极改变而运动。滚轮机器人以≈0.66 cm/s的速度穿过有四个障碍的道路(图4d)。其在前进过程中直行和转弯的灵活调整,展示了其在复杂环境中的广阔应用前景。
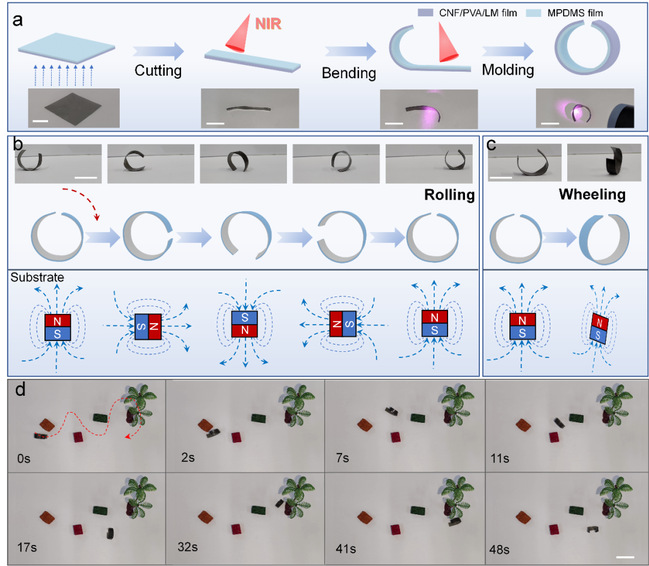
图4 基于 CPLMMP驱动器的滚轮机器人
基于CPLMMP驱动器良好的可编程性能,采用切割法将复合膜制作成规则的三角形运载机器人。由于NdFeB颗粒的可编程磁化特性,使用四种不同的磁化方法来制备具有不同磁化方向组合的运载机器人(图5)。为了更好地了解运载机器人的运动机理,选择了第三种磁化方式的运载机器人(Ⅲ)(图5c)作为研究对象,展示了运载机器人三肢的收放过程。在近红外光下,运载机器人的三肢向内收缩,撤去光之后,运载机器人形状固定,呈金字塔状。随后将运载机器人放置在边长为1cm 的正方形磁铁上,在边缘磁场的吸引下,原来收缩的三肢会释放,恢复原来形状。由于运载机器人的预磁化,通过改变机器人下方磁场的方向可以引导机器人的运动。基于机器人良好的形状保持能力,以及在热环境中通过磁响应形状恢复能力,运载机器人可以携带物体在不同地形条件(磨砂管道、纸张表面和斜坡)下运动,且运动期间都很好的包裹住物品,直到到达终点,通过磁/热来释放物体。(图6)这种良好的可控性极大拓展了软驱动器的应用领域。
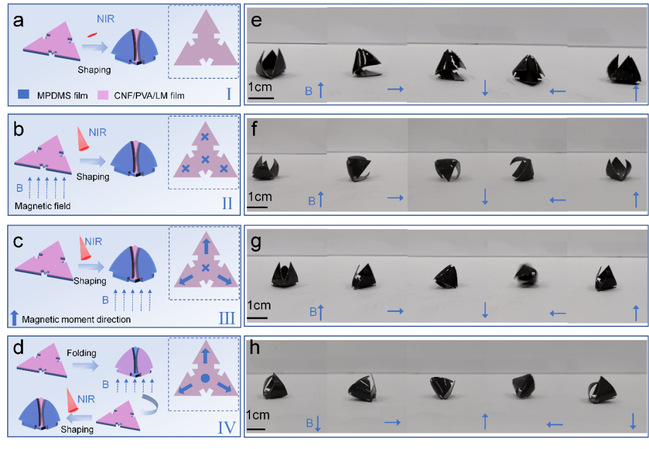
图5 基于 CPLMMP驱动器的运载机器人的可编程性能
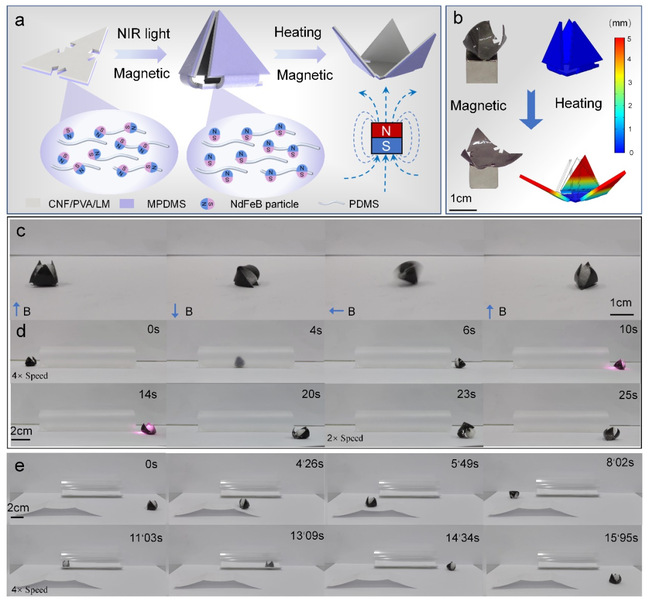
图6 基于 CPLMMP驱动器的滚轮机器人
本研究报告了一种具有塑性保持变形和可编程磁刺激形状恢复的三重刺激响应软执行器。CNF/PVA/LM的热收缩和MPDMS的热膨胀的耦合协同效应使致动器在电热和光热刺激下发生弯曲和塑性变形,并在热环境下响应磁场表现出可编程的形状恢复。该驱动器是将具有良好导电性和光响应性的CNF/PVA/LM薄膜与磁响应性MPDMS薄膜相结合制成的。基于光致伸缩材料优良的导电性,所制备的U型致动器在1.2 V的低电压下可以达到114°的弯曲性能,并且在近红外光(0.64W cm-2)下表现出优异的非接触式和远距离致动性能。利用软驱动器良好的多场耦合能量转换能力,轮式机器人和搬运机器人的成功应用展示了驱动器在软机器人和智能设备中的巨大潜力。
原文链接:Wenwen Li, Min Sang, Congcong Lou, Guojiang Liao, Shuai Liu, Jianpeng Wu, Xinglong Gong, Qian Ma, and Shouhu Xuan, Triple-Responsive Soft Actuator with Plastically Retentive Deformation and Magnetically Programmable Recovery, ACS Nano, 2023, DOI: 10.1021/acsnano.3c08888
https://doi.org/10.1021/acsnano.3c08888